Human detection robot is not a new technology. Many types of human detection robots were designed depending on the application. During the natural calamities like earthquakes, it is difficult to rescue the human beings under the buildings. Though detection by rescue team is done, it consumes a lot of time. Detection of human in appropriate time is very important in such situations. This article presents a simple human detection robot that is operated manually using RF technology.
Human Detection Robot Circuit Principle:
The main principle of the circuit is to detect the human using human detection sensor. The wireless robot is operated manually using PC. The wireless technology used here is Radio Frequency technology. The data is transmitted to receiver through RF. Using the received data, robot is operated and controlled.
Also Try This: [Line Follower Robot using Microcontroller]
Human Detection Robot Circuit Diagram:
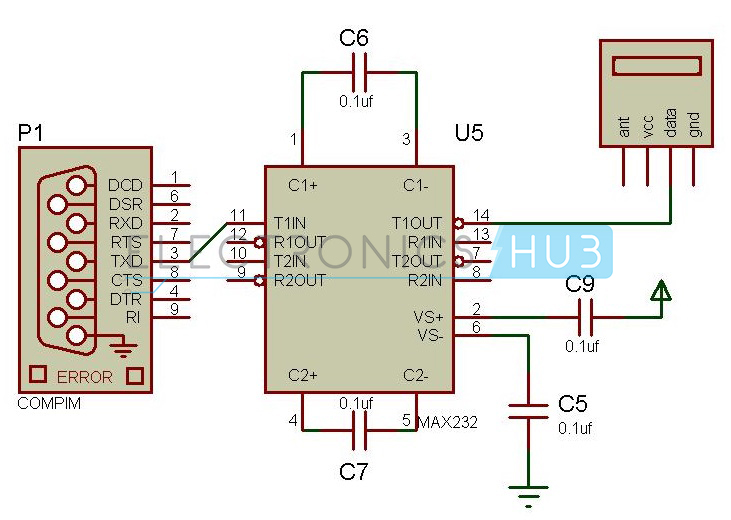
Transmitter Circuit:
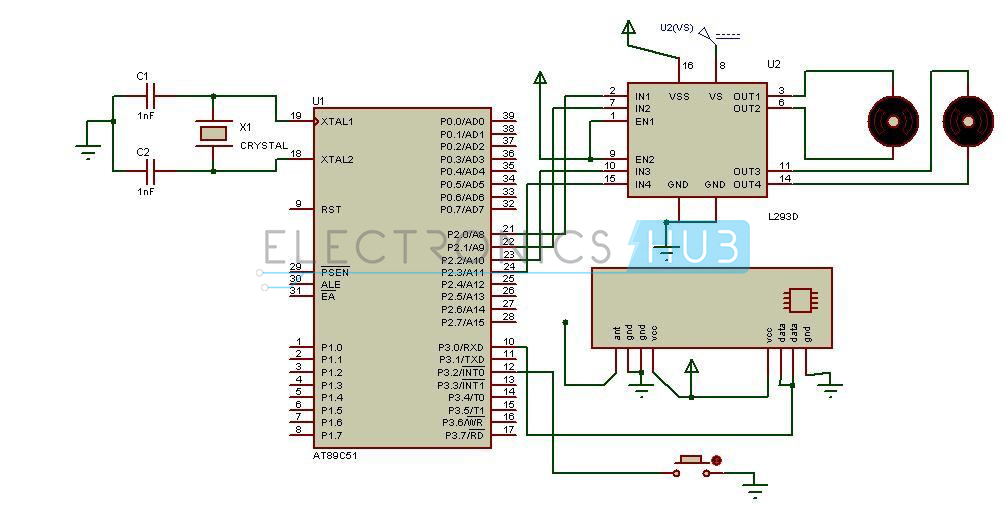
Receiver Circuit:
Circuit Components:
- AT89s51 microcontroller.
- PIR sensor.
- RF transmitter and receiver.
- L293D IC.
- PC.
- Robot chassis.
- Max232 IC.
- 9V battery.
- Motors.
How to Design:
The circuit can be divided into two sections 1) Transmitter Section, 2) Receiver Section.
Transmitter Section:
The transmitter section consists of PC, RF transmitter, MAX232IC, DB9 connector. The commands for operating the robots are transmitted using Personal computer. PC transmits the data to the RF transmitter through max232.
Max232 converts the logic levels. The logic levels of PC are in the range ± 3v to ± 15V, while the logic levels of RF module is compatible with TTL.In order to convert this voltage MAX 232 is used .This is also called level converter .The T1in pin of the MAX232 is connected to the receive pin of the DB9 which is in turn connected to the PC. The output pins are connected to the RF transmitter.
Radio frequency is the wireless technology used here to transmit the data .Several carrier frequencies were used in available modules such as 433.92 MHZ,315MHZ ,868MHZ,915MHZ,2400MHZ .Here the RF modules uses a frequency of 433 MHZ. The DATA pin of the RF transmitter is connected to the T1out of the MAX232.A Vcc of 5v is applied to the RF transmitter.
Receiver Section:
The receiver section consists of AT89c51microcontroller, L293D motor driver IC, RF receiver, motors of the robot, PIR sensor.
AT89c51 is an 8051 family microcontroller. It is an 8-bit microcontroller. It has 40pins.It has flash memory of 4K bytes.
The RF receiver module is connected to the port3 of the microcontroller. Data pins of RF receiver are connected to the receiver pin of the microcontroller. The two Vcc pins are shorted and connected to a supply of 5v.GND pins are shorted and connected to ground. The receiver module receives the data and transmits it to the microcontroller.
PIR sensor plays a main role in the circuit. This is used to detect the human beings. The PIR sensor is nothing but Passive Infra Red sensor. These sensors work on the principle that they every human being emits infra red radiations of very low wave length. Thus this sensor senses these radiations and outputs a logic high value. This sensor can sense the human within the range of 20feet. They have an operating voltage of 2.2-5V. PIR sensor is connected to the Port1 of the micro controller.
L293D is a motor drive IC. This IC is required to drive the motor and also eliminates back EMF generated. This IC internally has H-bridge circuit. This has 16 pins out of which four input pins are used to drive two motors. Enables are used to enable these input pins. A supply voltage of 5v is applied at the 16th pin to operate the IC.8th pin is applied with a voltage of 12v required to drive the motors. The L293D IC can drive voltages up to 36v.That is 8th pin can be applied with a voltage ranging from 2.4v to 36v.
Circuit Simulation Video:
How It Works?
- Initially burn the code into the micro controller.
- Arrange the robot chassis.
- Connect the transmitter and receiver circuits as shown in the circuit diagram.
- Now arrange the transmitter to the robot.
- Connect the receiver to the PC.
- Enter the character F in the hyper terminal of the PC.
- This makes the robot to move in forward direction.
- Now enter the character B to move the robot in reverse direction.
- Enter L and R to move the robot in left and right directions.
- While the robot is moving if any human detected by the PIR sensor robot stops moving and a buzzer is switched on.
Applications:
Following are the main applications of this Human Detection Robot.
- Human detection robot can be used at the time of natural calamities to save the lives of human.
- This can also be used to detect the humans in the war field.
- This can be used for security purpose in the jewellery shops, museums, etc.
Limitations of the Circuit:
- The PIR sensor cannot detect human out of its range.
Download Project Code
Note:
If you are interested to get code, kindly take some time and answer following questions in the comment section, so that we will send you the code.

108 Responses
Where I can get this project?
Hi Where can I find the codes? I really want to do this project this is my email add glennjandulong1997@gmail.com
from human direction robot
it is a good project.i am also doing this project but in this i am not using any robot
i m also doing the same project without robot just the human detector using microcontroller and at89s52 so can you please help me with the thesis of your project
CAN YOU PLEASE HELP ME WITH THESIS OF PROJECT DOING THE SAME WITHOUT ROBOT
Interesting one…go ahead…it’s really a very innovative project ideas.
can i get the code am having problem with simulating
bro did u have the code?
Im doing the above project(human detection robot).I need the code as a reference. for my project.
Were can I download the codes?
1. I work in Tata Steel Ltd. Jamshedpur Plant.. As we all know steel plant is very hazardous.. So we will show this project in our technical exhibition to have the proper detection of peoples.. This project will help to reduce tge level of accidents in our plant..
2. Yeah, the project will be slightly different.. It will have the additional feature of measuring the rate of IR radiation i.e. it will approximately show the magnitude of radiation…
3. The project will be used to save peoples to save lifes and also to increase the safety in hazardous plant..
1. I am working on this idea as a part of my independent project.I want to see the basic code and work on it.
2.Basically i am in interested in making a human detection circuit.I liked this idea of implementing it with a robot.I want to proceed in this direction.
3.I chose to work on the basis of human detection . I m interested in working it and hence request the code for my reference .
I am making the same project thats why i need the code…please send it to my mail id
1). It is my final year project.
2).I am making the same project.
3).It is my final year project for the detection of alive human beings.
sir/ mam it is my final year project please send me the code because i have to present it on 20 november…please help me for the same i will be thankful to you….please consider this reply as soon as possible.
thank you
Sir I am working on this project, pls help me
Hi Sir…
There is a requirement of a project for school children..
I am a science teacher ..
Please provide me code..
Thanks
Sir…
I am a teacher of a school. I have to make this, similar kind of project for children but don’t have much knowledge of code. Kindly provide me for that
I am trying the same project. I am interested in robotics field that’s why i like this one…please send the code….
I AM A 2nd YEAR DIPLOMA STUDENT
I GOT A PROJECT FROM MY COLLEGE TO MAKE PROJECT ON SOMETHING THAT CAN HELP HUMAN BEING IN AND FROM YOUR SITE I GOT THE IDEA OF MAKING HUMAN DETECTION ROBOT I WANT TO MAKE SAME PROJECT FOR THAT IT WILL HELP PEOPLE WHO ARE SUFFERING FROM EARTHQUAKE AND FLOODS I HAVE UNDERSTOOD THE CIRCUIT DIAGRAM AND I NEED TO KNOW THAT WHAT CODE ARE REQUIRED TO OPERATE THIS DEVICE PLEASE SEND ME THE CODE AS FAST AS POSSIBLE BECAUSE I HAD TO SUBMIT THE PROJECT BY THE END OF 1 WEEK OF THE DECEMBER
respected sir ,
i m new electronic student i have got to make my first electronic project and i would love to make this project this project is excellent this will help the people who got stuck and suffering from earthquakes please send me code for this project as fast as possible
thank you
how can we burn code
PLEASE SEND ME CODE
PLEASE SEND ME CODE AS FAST AS POSSIBLE
I M making same project.so I want some photos and code
thanku
I need the code as a reference. for my project.
We have already uploaded the code long back…Please go through the article..
There is the instruction which says “download project’s code” but when I click on the downloadingdoes not finish end up doing a shortcut, please send it to my email.
The code is downloading .Try to check in chrome
plz send me complete coad this project argenlty
i am making the same project so ineed the code and photos related to project.
1). It is my final year project.
2).I am making the same project.
3).It is my final year project for the detection of alive human beings.
i want a code
We have already uploaded the code .Please go through the article..
i need that code because it is related to my project
I’m doing this for my mini project .So would you please send me the code
Sr I am doing same project pls send me code sr
i want project code for human detection robot because I want to do this project in my college as miniproject.so requesting you kindly to send project code.
please send me project code for human detection robot.awaiting for quick reply.
1.I am doing mini project in my college
2.i am doing the same project
3.when i saw the concept i felt much intrested in doing it so please send code to my mail id..
I am making this project as my university project…i am making slight change in this project by using the arduino microcontroller…
That’s great..This is very interesting project..Please post your project images after completing it..
i m doing this as my mini project so pls send me a code thank u
I would like to do the same project with arduino
Can anyone help me?
I’m working on a University project.
I’ll try using a remote control ( Car Alarm remote)
InshahAllah will post once project is completed..
Thanks to everyone for there help so far awesome work.
we making this project as my university project…we are making slight change in this project by using the arduino microcontroller… and we are thing to use it for automation of lights and fans of room also.
thank you
I am doing the same project but differans is when human is detected then robot moves that direction.
I am doing the same project but I am struggling to get the correct code, please send me the code for this project.
Thank you
I am using Laptop. It has no DB9 Connector. Any other solutions instead of DB9??
You can use serial to USB converter
This is good project send me code
We are makin this project to present it in an inter college exibition…..we are going to include some changes using raspberry pi boards …..our project is to identify human body and detect its age …..
Thank you
I am engineering student in Nigeria, I just want to learn how design a robot
I just don’t wanna use motors, instead I’d like to use a beeping alarm (on the PC or transmitter section). What must be the changes in Circuit and code..
I am a high school student
Can you please describe how to burn the code and IDE to use
Use can use Avr studio IDE..MCU used atmega8…You ccan burn code directly to this with any external MCU..Please go through ATmega8 datasheet
I need the project code please because we’re trying to make a firefighter robot that is able to detect humans while also put out fire, if you don’t mind sharing your code I would be very thankful.
We Will Update it soon
I am interested this one
hello,
I’m trying to learn more about embedded systems on my own. if you could please send me the code to this project I will use it as a reference. Thank you.
I am final year student. I am trying to make same project. kindly send me the code.
I am trying the same project. please send the code….
Sir i.beg u tomorrow is the last date foe my simulation.i.need the code soon olz help me sir I’m intrester very much im eager to.do this project isr
yes i wish to get the code plz.. i am interested in this project
I WISH TO DO THIS PROJECT … CAN I GET THE CODE PLZZZZZZZZZ……?????
please help i need the source code of human detection robot for my final year project
I’m glad to be here, i need the code to excute my project….
anyone plzzzzz give me the code i need it urgently plzzzzzzzz
Hello there need help with code, building an escape room with pressure sensing lights to trigger Dmx props so this will be a cool project to detect human presence to control certain props.
Please mail me the code ASAP as I need it for reference of my project..
This project is quite interesting…
please send me the code
This project is very interesting because human life is very sensitive
To protect humans from danger situations of nature
so,i’m try this project
Thank you
Very interesting ! I want to make this project as my minor project .Kindly send me the code.Thankyou.
I am making same project so please give me the project code.as soon as possible
Code please
Please send me the code
this is a good project that someone can build without stress. kudos to the electronicshub.org owner. i will like to join the bandwagon. i have a B.Tech in Computer engineering, and am into hardware design specifically embedded.
I want to do this project as final year project……Please get me the code fr this project. Thank you.
I downloaded the code provided but it is not working with the simulation, as I enter the commands in virtual terminal the motors do not move.
I am planning to do this as my final year project.I am really loving this human detection robot project Please send me the code to my e-mil. i am waiting for your reply. Thank You.
its very intresting and nice project plz send me this project alll coad argent plz today send
i need the coding of this project ASAP
please forward me the code of this
Can u please send me the code
Plzzzzzz
Can u send me the code plzzz because I’m so interested in this project
Hi Where can I find the codes? I really want to do this project this is my email add
this project is interested .I am doing this project .But I have one challenge , THE motors do not stop when the sw is pressed .who can help me the c code ?
I want to do this project. Working on PIR sensor range
This project is really good.. i wish to do this as my final year project.. provide me with the source code
Hi its a good project
It’s a nice idea…after reading it really feels to implement it…so I did it but facing some errors in code. Pls do help me with d codes…ty..
Hello sir,
How do I burn the program code to ic?
please tell me.
Does this uses CAN?
How could it can only detect human being why not animals or any other
HI
I liked the project because of its clarity and ease of implementation
I.d like to get full code
It is a great project to help in difficult
This projet s interrssting please thé whole thesis
Good project
Hello sir, It’s good project .so i want all about this circuit
this is a really interesting project and I would like to do it for my final year project, please can you provide me with the source code
Good Afternoon from UK,
I am a 72 year old retiree (About time I think!) who is a radio nut and very interested in computers, especially those which I can use in my radio work.. I am big fan of radio control and very interested in circuits such as you have here. Obviously a a radio controlled device is not a true robot as it is under remote control, but I would love to get the software to run circuits such as you have here. Can you please send me some, or point me in the right direction? Many thanks and keep up the good work. Anything is better than Alzheimers! (JOKE!) Best Regards, Gary
You really make it appear really easy along with your presentation however I to find this topic
to be actually something which I think I might never understand.
It sort of feels too complex and extremely extensive for me.
I am taking a look forward on your subsequent submit, I
will attempt to get the cling of it!
Pls send the code
Hey , I am interested to make this project .I need its coding please send it’s coding.
Can u please send me the code looking forward to doing this project
Plz send me the code
Thank you
Hello, it is a very good project. Kindly enlighten me on how to get the code