If you are a new driver then it is very difficult to judge the distance while parking the car. Reverse parking sensor circuit solves this problem by indicating the distance with the help of three LED’s. We can easily arrange this system at the back side of the car. This system operates with 12V rechargeable battery. This article explains you how to design Reverse parking sensor. We can also use the same concept in IR Water Level Detector Circuit also.
The distance between car and obstacle is understood by the group of LED’s (D5 to D7). If the distance between car and obstacle is 25cm then D7 will glow. At the distance of 20cm D7 and D6 LEDs turn ON and at a distance of 5cm all LED’s (D5, D6, D7) glow. When the distance is more than 25cm then all LED’s will turn off.
Reverse Parking Sensor Circuit Principle:
Parking sensor circuit mainly consists of two sections, one is transmitter section and the other is receiver section. The transmitter section uses NE555 timer IC as an astable multivibrator for driving the IR transmitter. The transmitter frequency is set to be 120Hz.
The IR pulses transmitted by the IR transmitter are reflected back because of the obstacle and received by the IR receiver.
The received signal is amplified by the U2:A. The output voltage of the Peak detector (R4 and c4) is proportional to the distance between car bumper and obstacle. The output voltage of the peak detector is given to the inputs of three comparators U2: B, U2: C and U2:D. These comparators switch the status LED’s according to the input voltage and the reference voltage.
Reverse Parking Sensor Circuit Diagram:
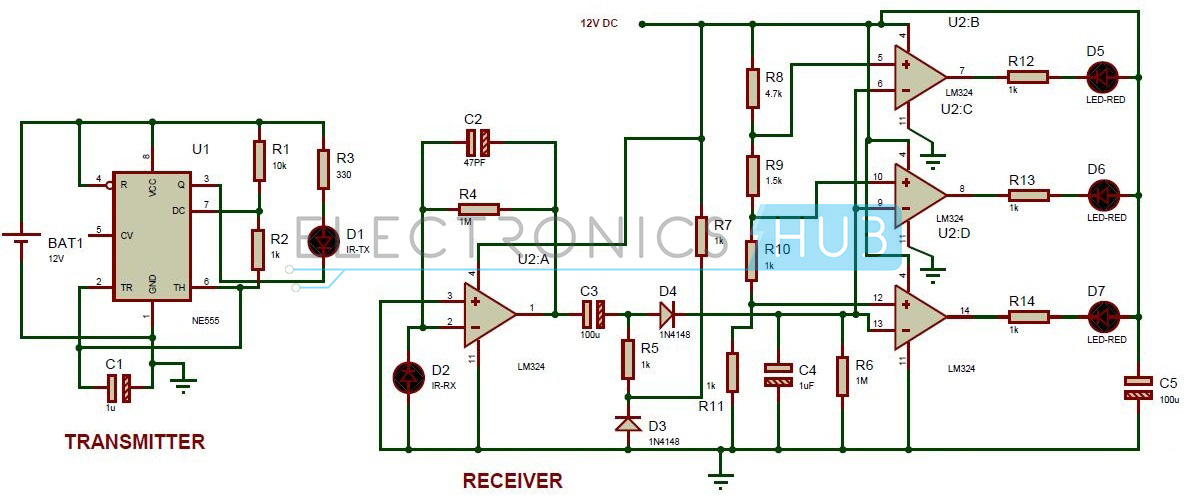
Transmitter:
- NE555 timer
- IR transmitter
- Electrolytic capacitor – 1uF, 16V
- Resistors – 10k, 1k, 330 ohm
Receiver:
- LM324 IC (low power quad op-amp)
- IR receiver
- 1n4148 diodes – 2
- Electrolytic capacitors – 100u (2), 10u, 47p, 1u
- LED’s – 3 (5mm)
- 1k resistors – 7
- 1M ohm resistors – 2
- 4.7k , 1.5k resistors
- 12V DC battery
- Connecting wires
Reverse Parking Sensor Circuit Design:
In transmitter section, 555 timer is operated in astable mode to generate a signal with frequency of 120 Hz. The 4th pin of 555 timer is connected to supply to avoid sudden resets. The output pulse is produced at 3rd pin of 555 timer. Here resistors R1, R2 and C1 set the output frequency of 555 timer.
The received by the IR receiver is amplified the by the operational amplifier U2:A. Resistor R4 and C4 forms peak detector to detect peak of the amplified signal.
Op – amp as Comparator:
Op-amp has two inputs (non-inverting and inverting) and one output. The output of operational amplifier is high when non-inverting voltage is greater than inverting voltage.
The output voltage is low, when inverting voltage is greater than non-inverting voltage.
In the above circuit the voltages at non inverting pins of comparators acts as a reference voltage and inverting input voltages at comparators are compared with reference voltages to produce the output.
Here resistors R8 to R11 are used to set different reference voltages at their non inverting pins.
Resistors R12, R13 and R14 are used to protect the LED’s from high voltages.
Related Post: Car Parking Security Guard Circuit using IR
How to Operate this Reverse Parking Sensor Circuit?
- Give the connections according to the circuit diagram.
- Arrange transmitter and receiver in such a way that IR receiver should receive the IR rays when obstacle is present.
- Switch on the supply and place the obstacle beyond 25cm, now you can observe that no LED will glow.
- Reduce the obstacle distance to 25 cm, now you can observe that D7 led will glow.
- Now reduce the distance to below 20 cm, then both D7 and D6 led’s will glow.
- Still if you reduce the distance to 5 cm, then all LED’s will turn on.
Reverse Parking Sensor Circuit Applications:
- This circuit can be used in auto mobiles to park the vehicle safely.
- We can use this circuit to measure the distance.
- We can also use this circuit as IR Liquid Level Detector by making few modifications.
Limitations of this Circuit:
- IR receiver may receive the normal light. As a result, parking sensor may not work properly.
- We should arrange IR sensors accurately; otherwise they may not detect the obstacle.

17 Responses
What type of IR transmitter and receiver we have to use!? Is it 5mm or 3mm!?
Do we have suitable replacement for 1n4148 diode as it is out of stock in shops
can I change the IR transmitter and IR receiver to Sharp Infrared sensor (10cm-80cm) in this circuit.? What should I do to connect the sensor.? Please help.?
Is this circuit accurate I am not getting the required results!
did you build this circuit on circuit wizard or multisim?
hay,
i did this circuit, but all 3 leds are glowing even when transmitter is off
can you plz tell me what i am doing wrong…….
Sir,
All ieds are glowing even when transmitter is removed plz tell me wat am doings wrong
even we are facing the same problem . Please help !
connect D3 1N4148 in opposite direction.
Even we are facing the same problem. Please help!
Guys I had the same problem Remove Resistor R7 it overloads the circuit, after that it should work fine. Also make sure that transmitter and receiver LEDs are perfectly aligned. Mine started working perfectly after that.
Did u used 25v rated capacitor or somrthng else
A real parking sensor uses sonar waves, I do not recommend this circuit :p
can we use in pic microcontroller behalf of 555
What type of IR transmitter and receiver are used? In details please.
What are the IR transmitter and receiver used? I need the details. Thank you.
How can I manipulate the distances? I want the second LED to glow when distance becomes less than 15cm and the third one to glow after 10cm.