A four-quadrant or multiple-quadrant operation is required in industrial as well as commercial applications. These applications require both driving and braking, i.e., motoring and generating capability.
Some of these applications include electric traction systems, cranes and lifts, cable laying winders, and engine test loading systems.

The different quadrant operations drive the motor with normal as well as reversal of both voltage and currents so as to run as well as to break the motor either in forward or reverse directions.
Let us discuss these 4-quadrant operations in brief.
Four Quadrant Operations of DC Motor
Consider First! A DC Motor Control
A DC motor may operate in one or more modes (or quadrant) in variable speed applications. The major advantage of using DC motor is that the ease of its control.
The speed of the DC motor is controlled by applying a variable DC input for below rated speed control. For above rated speeds, the motor is controlled by applying variable current through its field winding.
For reversing the direction of rotation, either polarity of the supply voltage (which is applied to armature terminals) or the direction of field current has to be changed.
By using DC motors, it is possible to obtain smooth speed control over a wide range in clockwise as well as anti-clockwise directions.

The torque of a DC motor is proportional to the armature current which in turn depends on the difference between back emf and applied voltage.
Therefore, it is possible to make the motor to develop positive or negative torque simply by controlling the applied voltage to a greater or lesser than the back emf.
Thus an armature controlled DC machine is inherently capable of operating different modes or quadrants, generally it is known as four-quadrant operation of a motor.
In multi-quadrant operation or four quadrant operation, motor accelerates or decelerates depending on whether motor torque is lesser or greater than load torque.
During motor acceleration, it should supply not only the load torque, but an additional component of load current to overcome the inertia.
Motor positive torque produces the acceleration in forward direction. In this, the motor speed is positive when the motor is rotating in forward direction.
During motor deceleration, the resultant or dynamic torque has a negative sign. This torque assists with motor developed torque and maintains the motion by extracting the energy from stored energy.
Hence the motor torque is considered as negative if it produces deceleration.A motor can be controlled in such a way that it operates in two cases; motor action and braking action.
Motor action converts the electric energy into mechanical energy and it produces forward motion, hence it called as motoring action, whereas braking action converts mechanical energy to electrical energy which gives forward braking motion, it is termed as generator.
Similarly, these two actions are performed in case motor operating in reverse direction, i.e., (reverse motoring and reverse braking actions).
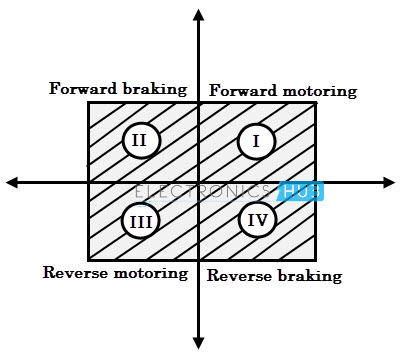
What are Four-Quadrant Operations?
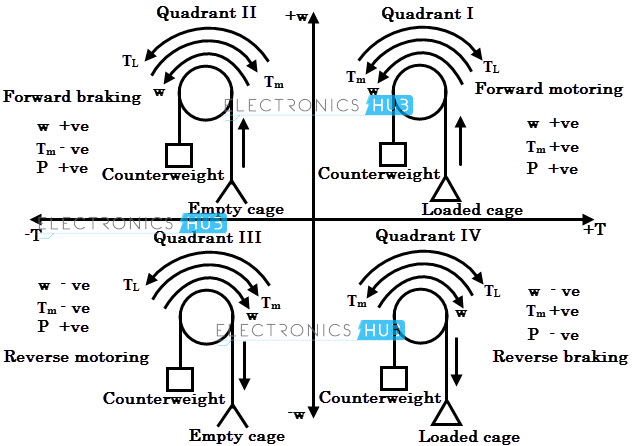
Before beginning our discussion on how a DC motor works in 4 quadrants, we will look at the four quadrant operation of a motor driving a hoist load as shown in figure below.
This hoist consists of a cage with or without any load. A rope, generally made up of a steel wire is wounded on a drum to raise the cage and a balance weight.
This balance weight or counterweight magnitude is greater than that of empty cage, but less than the loaded cage.
For each quadrant of operation, direction of rotation, w, load torque, TL, and motor torque Tm are shown in figure. Consider that the load torque is constant and independent of motor speed.
The four operating modes of a hoist are described below.
Loaded cage moving up
This is the first quadrant operation of the hoist in which the loaded cage is moving upwards. Due to the upward movement, the direction of rotation of motor, w will be in anticlockwise direction, i.e., positive speed. Here the load torque acts in opposite direction to the direction of motor rotation.
Therefore, to raise the hoist to upwards, the motor torque, Tm must act in the same direction of motor speed, w. So both motor speed and motor torque will be positive.
To make these as positive, the power taken from the supply should be positive. This is called forward motoring.
Empty cage moving up
This is the quadrant-2 operation of the hoist in which unloaded cage is moving upwards. As said above, the counterweight is heavier than the unloaded cage and hence hoist can move upwards at a dangerous speed.
To prevent this, motor must produce a torque in the opposite direction of motor speed, w in order to produce brake to the motor.
Therefore, the motor torque, Tm will be negative and motor speed, w will be positive. Since the speed of the hoist is positive, it receives the power from the supply and hence the power is positive. This quadrant operation is called forward braking.
Empty cage moving down
This is the quadrant-3 operation where empty cage is hoisting down as shown in figure. The downward journey of empty cage is prevented by the torque exerted by the counterweight. So the direction of motor torque, Tm should be in the same direction of motor rotation w.
Due to the downward movement of the cage, the direction of rotation is reversed, i.e., w is negative and hence Tm is also negative.
Since the machine acting as motor in reverse direction, it receives the power from the supply and hence power is positive. This quadrant operation is called reverse motoring.
Loaded cage moving down
In this quadrant, loaded cage is moving downwards. Since the loaded cage is moving downward (of which weight is more than counterweight), the motion takes place without use of any motor.
But there will be a chance to go downward at a dangerous speed because of loaded cage. To limit the speed of the cage within a safe range, the electrical machine must act as a brake.
In this the direction of the motor, w is negative and hence the motor torque Tm is positive to decrease the speed of the motor. Thus the power is negative that means the electrical machine delivering power to the supply.
This phenomenon is called as regenerative action. This quadrant operation is called reverse braking.
It is to be noted that the electrical machine acts as a motor in 1st and 2nd quadrants and acts as a generator in 3rd and 4th quadrants.
But the motor should be separately excited DC motor or three-phase AC induction motor to operate in these four different modes.
Four Quadrant Operation of a DC Motor
In a separately excited DC motor, the steady state speed is controlled at any desired speed by applying the appropriate magnitude of voltage, also in either direction simply by giving appropriate polarity of the voltage.
The torque of the motor is directly proportional to the armature current, which in turn depends on the difference between the applied voltage V and back emf, E, i.e.,
I = (V – E) / R
Therefore, it is possible to develop positive or negative torque by controlling voltage, which is less than or more than the back emf. Hence the separately excited DC motor inherently exhibit four quadrant operation.
The below figure shows four quadrant operation of a separately excited DC motor in which a dot symbol on one of motor terminals indicates the sign of the torque.
The machine produces a positive torque, if current flows into the dot. Similarly the torque is negative, if current flows out of the dot. Also, the relative magnitudes of voltage and back emf are shown in figure. These four quadrants are explained below.
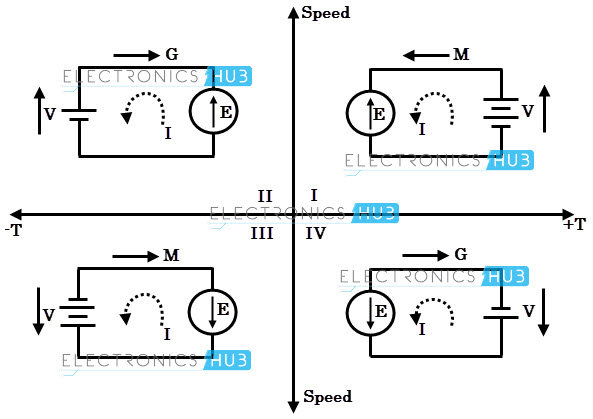
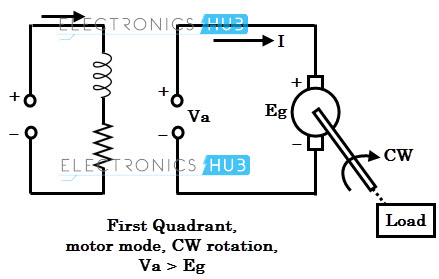
Forward Motoring
In this mode of operation, the applied voltage is positive and greater than the back emf of the motor and therefore a positive current flow into the motor.
Since both current and voltage are positive, the power becomes positive. And also the speed and torque are also positive in this quadrant. Therefore the motor rotates in forward direction.
 Forward Braking
Forward Braking
In this mode of operation, the motor runs in forward direction and the induced emf continues to be positive. But the supplied voltage is suddenly reduced to a value which is less than the back emf.
Hence the current (there by torque) will reverse direction. This negative torque reverses the direction of energy flow.
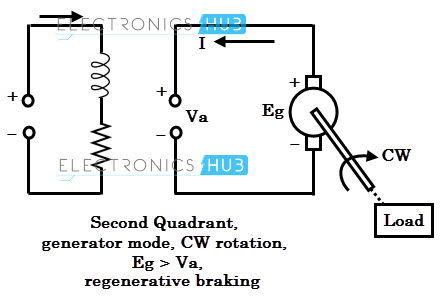
Since the load torque and motor torque are in opposite direction, the combined effect will cause to reduce the speed of the motor and hence back emf (motor emf is directly proportional to the speed) falls again below the applied voltage value.
Hence, both current and voltage become positive and the motor settle down to first quadrant again. The process by which the mechanical energy of the motor is returned to the supply is called as regenerative braking.
This quadrant operation is the example of regenerative braking.
Reverse Motoring
This is the third quadrant operation of the motor in which both motor voltage and current are negative. Thus the power is positive, i.e., the power is supplied from source to load.
Due to the reverse polarity of the supply, the motor starts rotating in a counterclockwise direction (or reverse to normal operation).
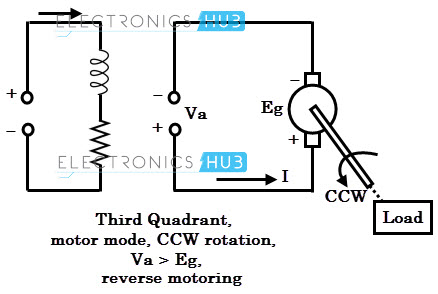
The operation of this quadrant is similar to the first quadrant, but only difference is the direction of rotation. The magnitude of voltage to the motor decides the appropriate speed in reverse direction.
Reverse Regenerative Braking
This is the quadrant-4 mode of operation in which motor voltage is still negative and its armature current is positive.
This mode of operation is similar to the second quadrant operation and once again the regeneration occurs whenever the back emf is more than the negative supply voltage.
Hence the torque will be positive which opposes the load torque, thus the speed of the motor will be reduced during reverse operation of the motor.
 ‘
‘
This mode of operation is mostly used for plugging in order to stop the motor rapidly. During plugging, the armature terminals are suddenly reversed, which causes the back emf to force an armature current to flow in reverse direction.
Now the effective voltage across the motor becomes 2V (as V+ Eb). A braking resistor in series with the motor has to be connected to limit this current.
Braking by plugging gives greater torque and more rapid stop, but the current drawn from the supply and energy stored in mechanical parts must be dissipated in resistance.
Applications of Four-quadrant Operation
- Electric traction system
- Battery operated vehicles
- Lifts and cranes
- Engine test loading systems
- Spindle and tool drives in machine tools
- Auxiliary drives in robotic systems
- Position control systems

One Response
In the second quadrant the power is negative not positive